Está disponible la primer versión del simulador del Multiplo N6
Implementado por el Grupo Lihuen y desarrollado utilizando Pilas, un framework para la creación de videojuegos, el simulador promete ser una herramienta libre y gratuita para enseñar a programar en Python en escuelas. Su código se encuentra bajo la licencia pública GPL y puede ser descargado e instalado desde el repositorio de LihuenGNU/Linux bajo el nombre de “pilas”.
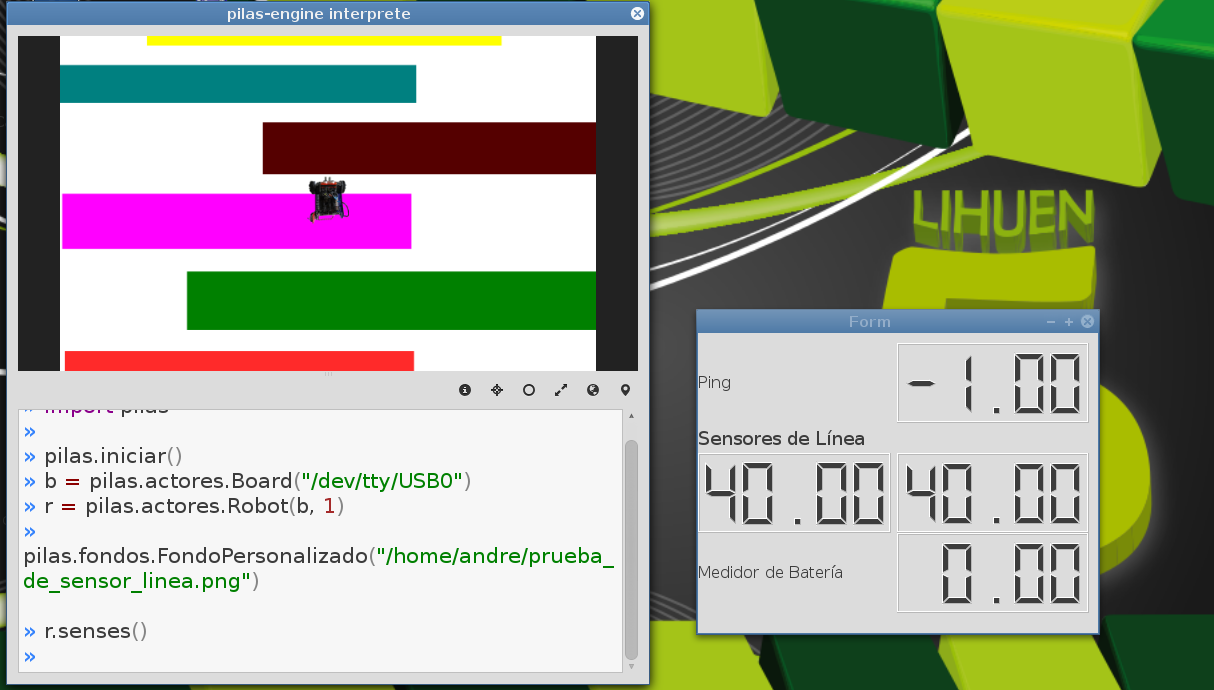
El objetivo del trabajo es lograr el desarrollo de una aplicación con interfaz gráfica que permita la interacción entre el alumno y un robot virtual a través de un intérprete Python. El uso de la herramienta está planificado para aulas donde cada robot físico tiene que ser usado por un grupo numeroso de alumnos los que tienen que esperar para verificar los resultados de las actividades que le plantea el docente en el recurso físico. Otro beneficio que permite el simulador es la posibilidad de asignación de tareas para el hogar a los participantes de los cursos, porque no será necesario el robot físico para realizarlas. Asimismo será de gran utilidad en aquellas escuelas donde directamente no se cuente con ningún Multiplo N6.
La facultad de informática está utilizando robots como herramienta pedagógica desde hace más de 3 años en pasantías académicas y cursos en escuelas secundarias, en el marco del proyecto: “Programando con robots y software libre”. Para tal objetivo se creó material explicativo con actividades específicas que, a partir del desarrollo del simulador, puede también ser utilizado por instituciones interesadas en la enseñanza bajo ésta metodología que no requiere la compra robots desde un principio.
El Multiplo N6 es un robot desarrollado con fines educativos, diseñado y ensamblado en Argentina por la empresa RobotGroup. Cuenta con 3 ruedas que le posibilita movimientos horizontales y giros. Tiene incorporado dos sensores reflexivos (de línea), que le permiten la detección de cambios de contrastes entre superficies claras y oscuras. Forma parte de sus características un sensor de distancia ultrasónico con capacidad de detección de obstáculos desde centímetros de distancia hasta 6 metros de longitud. El componente más importante, la placa central, está basada en Arduino, un proyecto de hardware de especificación abierta.
Para el desarrollo del simulador se seleccionó al framework Pilas-engine por tratarse de un entorno multiplataforma que posibilita una programación e instalación sencilla. Su código fuente y documentación están implementadas en español, lo que facilita su interpretación y modificación por los alumnos.
Referencias:
Proyecto Programando con Robots y Software Libre
Empresa RobotGroup
Proyecto Pilas-engine
Si tienen problemas para instalar (un cartel que dice algo de las firmas gpg) ejecuten esto en una terminal de administrador:
wget https://repo.lihuen.linti.unlp.edu.ar/pool/lihuen5/main/l/lihuen-keyring/lihuen-keyring_2013.12.17-1_all.deb
dpkg -i lihuen-keyring_2013.12.17-1_all.deb
apt-get update
Luego para correr pilas, pueden presionar Alt-F2 y escribir pilas (la próxima le agregamos el iconito como corresponde).